CodesForLaneDetection : 道路の白線を検出する機械学習モデル
ailia SDKで使用できる機械学習モデルである「CodesForLaneDetection」のご紹介です。エッジ向け推論フレームワークであるailia SDKとailia MODELSに公開されている機械学習モデルを使用することで、簡単にAIの機能をアプリケーションに実装することができます。
CodesForLaneDetectionの概要
CodesForLaneDetectionは2019年8月に公開された白線を検出する機械学習モデルです。白線の検出は自動運転などのアプリケーションに応用可能です。CodesForLaneDetectionでは、入力された画像に対して、ピクセル単位で白線をセグメンテーションします。
出典:https://arxiv.org/abs/1908.00821
CodesForLaneDetectionのアーキテクチャ
白線の検出はLane Detectionという分野になります。Lane Detectionの認識対象となるレーンは、物体で遮蔽される、途切れる、照明条件が変化する、といった特性があり、難しいタスクです。また、レーンは長く細いため、アノテーションされるピクセル数は背景よりも少なく、スパース(疎)なセグメンテーションとなります。スパースなセグメンテーションを行う場合、アノテーションデータのレーンの幅を事前に太くする方法もありますが、認識精度が低下します。
スパースなセグメンテーションを直接行う場合、Multi Task Learning (MTL)やMessage Passing (MP)という技術が使用されます。しかし、MTLは追加のアノテーションが必要であり、MPは推論時間が増加するという問題があります。
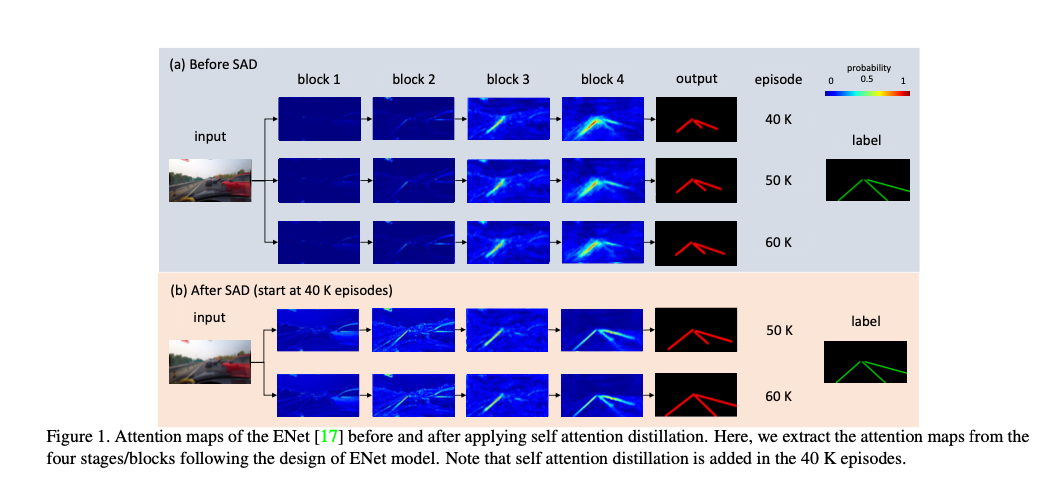
CodesForLaneDetectionでは、Self Attention Distillation (SAD)によって、出力に近い層の情報を、入力に近い層に与えながら学習を進めることで、精度を改善します。具体的に、各ブロックのAttension Mapの出力が、次のブロックのAttension Mapに近づくような制約を加えて学習します。Attension Mapは各層の出力のチャンネル方向の二乗和を使用しています。
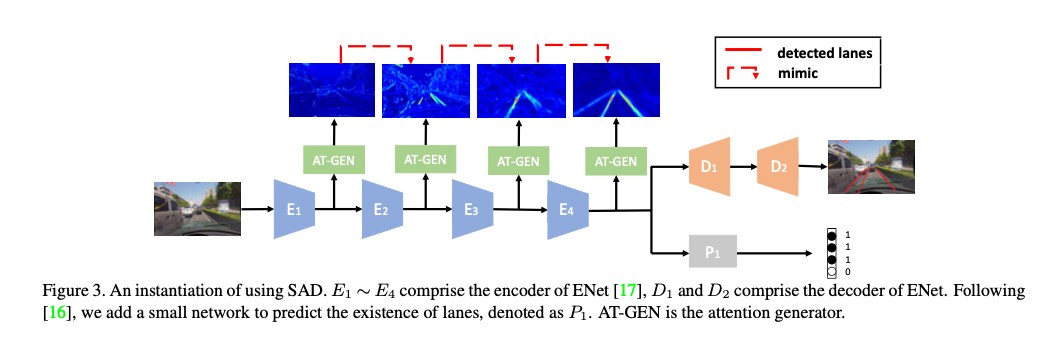
出典:https://arxiv.org/abs/1908.00821
SADは学習に作用するため、任意のCNNと組み合わせて使用することができ、推論速度に影響を与えません。CNNのBackboneとしてはENet、ResNet、ERFNetが例示されています。ERFNet(Efficient Residual Factorized ConvNet for Real-time Semantic Segmentation)は2017年12月に公開されたリアルタイムセグメンテーション用のモデルアーキテクチャです。
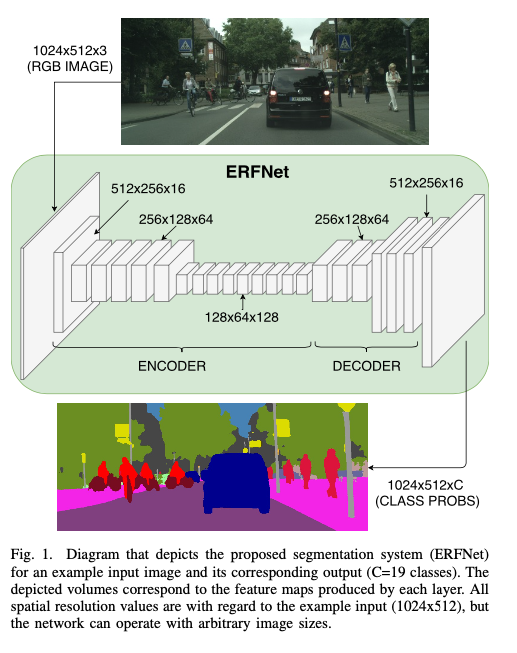
ERFNetのアーキテクチャ(出典:http://www.robesafe.uah.es/personal/eduardo.romera/pdfs/Romera17tits.pdf)
CodesForLaneDetectionには、データセット(TuSimple、CULane、BDD100K)ごとに、ENet-TuSimple、ERFNet-CULane、ENet-BDD100K、の3つのモデルがあります。
CodesForLaneDetectionの入力と出力
ERFNetの場合、入力はBGR順で(1,3,208,976)、出力は(1,5,208,976)となります。出力はチャンネル0を除く、チャンネル1〜5に4レーン分のヒートマップが出力されます。チャンネル1を青、チャンネル2を緑、チャンネル3を赤、チャンネル4を黄色として可視化すると、下記のようなレーンを取得することができます。

入力:https://github.com/czming/RONELD-Lane-Detection/tree/main/example/00000.jpg
{kind=link}
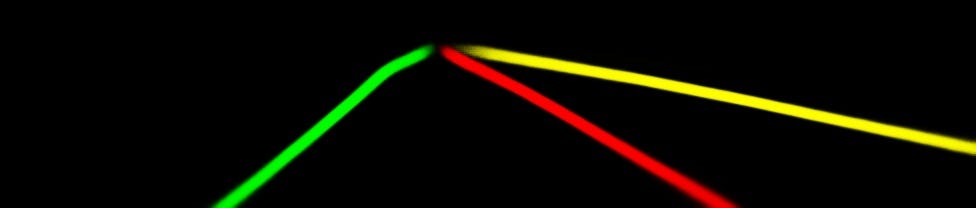
出力
ERFNetの入力画像のアスペクト比の調整においては、画像のクロップが使用されています。
image = image[240:, :, :]
CodesForLaneDetectionの使用方法
下記のコマンドで任意の動画に対して白線の検出を行うことができます。現在はERFNet-CULaneのみ対応しています。
$ python3 codes-for-lane-detection.py --video VIDEO_PATH
実行例は下記となります。
アイリア株式会社はAIを実用化する会社として、クロスプラットフォームでGPUを使用した高速な推論を行うことができるailia SDKを開発しています。アイリア株式会社ではコンサルティングからモデル作成、SDKの提供、AIを利用したアプリ・システム開発、サポートまで、 AIに関するトータルソリューションを提供していますのでお気軽にお問い合わせください。